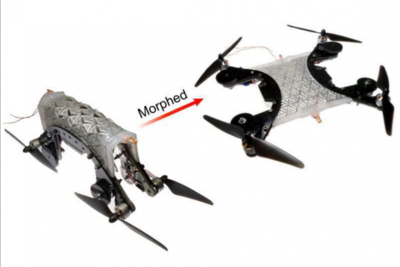
工程师团队成功研发出一种基于新型金属功能材料的创新型软体机器人,它可以在路面机器人与无人机两种形态间实现灵活转换。这款机器人采用具有形状记忆与自修复特性的金属复合智能材料,通过预设程序控制材料结构变化,从而完成形态与功能的动态切换。
在路面模式下,机器人通过轮式或履带结构实现稳定移动,能够执行地面探测、物资运输等任务。当遇到障碍或需要快速跨越复杂地形时,机器人可通过内置的智能驱动系统触发材料形变,展开轻量化旋翼结构,迅速转换为空中无人机模式。这种转换过程仅需数秒,无需人工干预,展现了材料科学与机器人技术的深度融合。
新型金属功能材料在其中起到关键作用:其独特的相变特性使机器人结构能在刚性与柔性状态间可控转换,而优异的导电性与热响应性能则为机器人的高效能源管理与自主决策提供了硬件基础。该材料还具备环境自适应能力,可在不同温度与湿度条件下保持性能稳定。
这项突破性技术为应急救援、环境监测与军事侦察等领域提供了全新解决方案。研究团队计划进一步优化机器人的续航能力与群体协同性能,推动其在更多复杂场景中的实际应用。